Introduction:
The subject theory of machine may be defined as the branch of engineering science, which deals with the study of relative motions between the various part of a machine and force which act on them.
- The study of theory of machine provides very essential for an engineer in designing the various parts of a machine. It’s furnish theoretical knowledge and foundation for analysis, design, operation and improvement of various types of mechanical system and has several application are used across various industries.
Machine: A machine is a mechanism or a combination of mechanisms which not only impart definite motions to the part, but also transmits and modifies the available mechanical energy into some kinds of useful energy. These useful energy may be in the shape of some kind of desired out work.
Mechanisms: A combination of rigid or restraining bodies, which are so saved and connected that they move upon each other with defined relative motions, is known as a Mechanism.
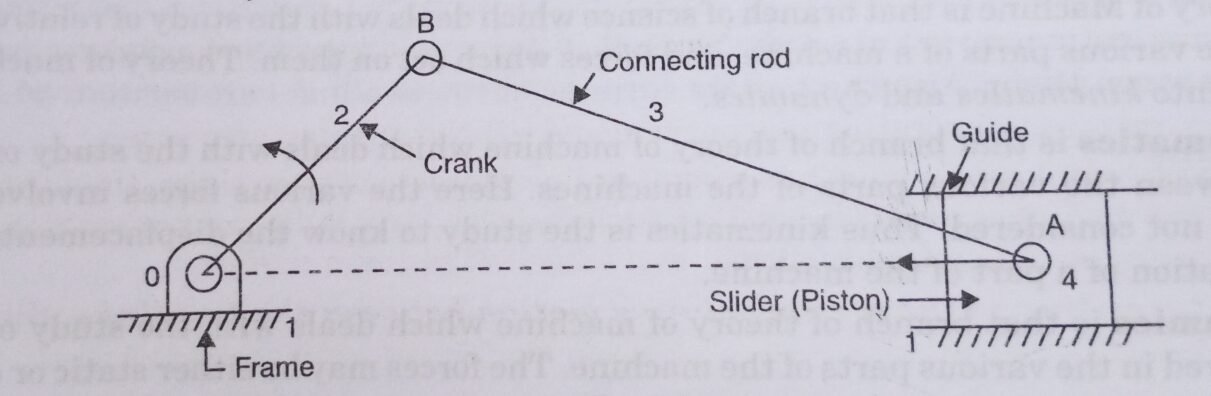
- Figure below shows a mechanism which is known as slider crank mechanism. It is a combination of rigid or restraining bodies are, crank, connecting rod and slide. They are so shaped and connected that they move upon each other with definite relative motions
Sub-divisions of Theory of Machines :
The Theory of Machines may be sub-divided into the following four branches :
- Kinematics: It is that branch of theory of machines which deals with the relative motion between the various parts of the machine. It’s a branch of physics that defines motion with respect to time and space. Thus kinematics is the study to know the displacement velocity and acceleration of a part of the machine.
- Dynamics: It is that branch of theory of machines which deals with the motion of objects and the physical factors that affect them, while acting upon the machine parts in motion. Dynamics is related with describing its motion and explaining its causes.
Dynamics is further divided into two parts, kinetics and statics :
- Kinetics: It is the branch of theory of machines which deals with the inertial force, which arise from the combined forces and torques on the motion and mass of the machine parts.
- Statics: It is that branch of theory of machines which deals with the force and their effects while the machine parts are at rest. The mass of the part is assumed to be negligible.
Plane motion:
In mechanical engineering, the concept of plain motion plays a essential role in perceiving the movement of body in a two- dimensional space. Plane motion specifies to the movement of the body or an object confined to a single-plane or surface, without any significant divergence in its path. A body with plane motion will have only three degrees of freedom.
Plain motion may be sub-divided into the following two types:
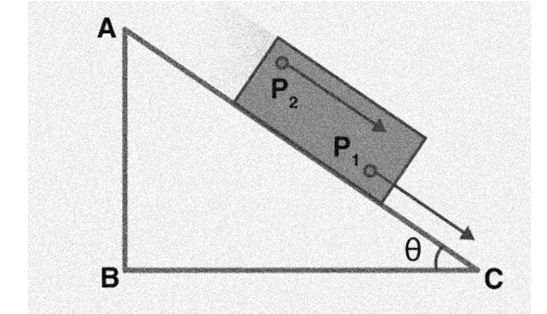
- Translation motion: It is the simplest form of motion, Translation motion involves the all points of a moving body moves uniformly in straight line without rotation. In this motion, all the particles of a body moves parallel to each other. It is also known as (linear motion). Example of translation motion: (Train moving along a railway track). Each coach of the train moves forward in a straight line without any rotation around its axis.
Figure below shows the mechanism of translation motion:
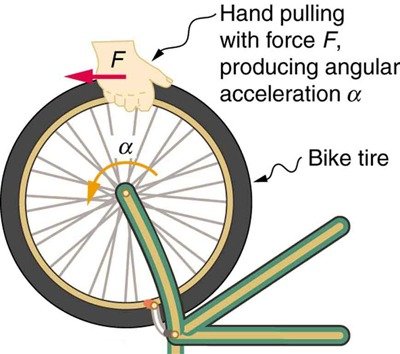
2. Rotation motion: In this motion, Rotation occurs when a body or an object pivots or spin around a fixed orbit around a circular path. This motion is extensive in various mechanical systems, from simple pulleys to complex gear assemblies. It is also known as (circular motion). Examples of rotation motion: (The motion of the gears, wheel, motors, etc). is rotational motion.
Figure below shows the mechanism of rotation motion:
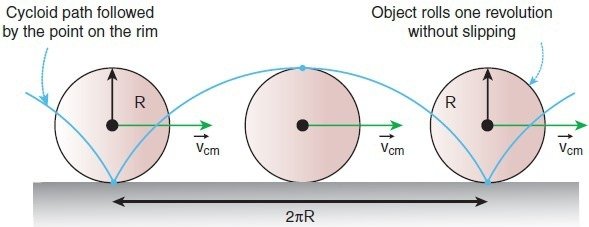
3. Combined motion: In this motion, the motion of an object that combines two dissimilar types motion, such as translation and rotation motion. Example of combined motion: (the wheel of a moving train have both the translatory as well as rotatory motions. As the wheel moves forward (translation), it also rotates around its axis (rotation).
Figure below shows the mechanisms of combined motion: