

In the theory of machine, a link is defined as a member or a combination of member that connects two or more parts of machine or mechanism. A link is also commonly known as (Kinematic link or element). It’s basically a single unit that transfer’s forces and motion within the machine’s mechanism.
- A link or element must not be rigid, but it must be resistant. A body is said to be resistant if it can transmit the necessary force with negligible distortion. As a result, a link should have two following characteristics:
- Each part of a machine, moves relative to some other part.
- It must be a resistant body.
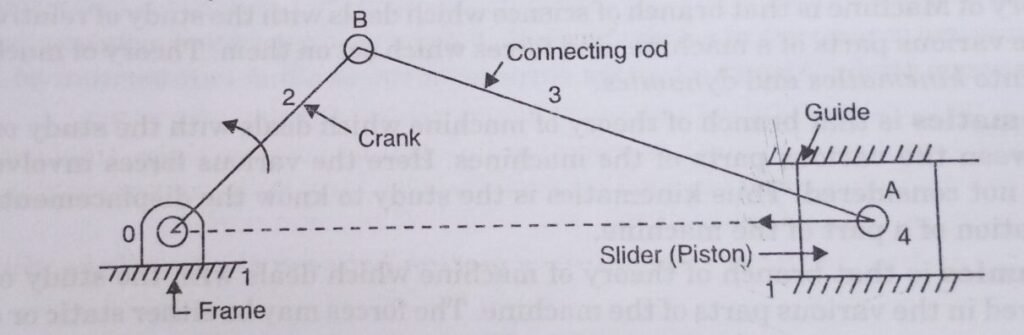
A slider-crank mechanism consists of following four links:
- Frame: A frames are rigid and stationary structures to support loads. It is made up of rigid members and pin-connected members that contour a stable system to support externally applied load.
- Crank: A crank is an arm or lever that is attached at a right angle to a rotating shaft. When merge with a connecting rod, crank is responsible for converting the circular motion into reciprocating motion, or vice versa.
- Connecting Rod: A connecting rod is a rod that connects the piston to the crankshaft. In a engine connecting rod is responsible for converting the reciprocating motion of the piston into the rotational motion.
- Slider: The mechanism of slider is a typical mechanical linkage that change rotational motion into linear motion or vice versa.
Types of links:
Links can be categorized based on there method of connection, shape or function. Here are some usual types of link in the theory of machine:
Classifications based on numbers of element of links:
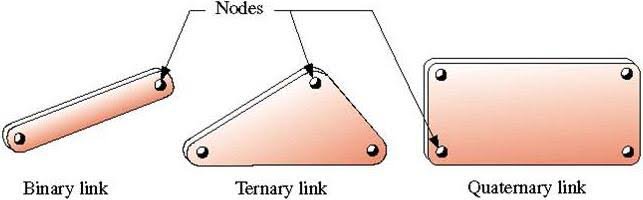
- Binary link: A binary link is a link which is connected to other links at two points (It has two nodes). It allows for relative rotational or sliding motion between the two connected links or elements and has two degrees of freedom (This means it allows motion in two different directions). An example of binary link is a (crank connecting to a piston in an engine).
- Ternary Link: A ternary link is a link which is connected to other links at three points (It has three nodes). It allows for more complex relative motion between the three connected links or elements and has three degrees of freedom (This means it allows motion in three different directions). An example of ternary link is a (windshield wiper linkage).
- Quaternary Link: A quaternary link is the most complex type which is connected to other links at four points ( It has four nodes). This links can generate very complex motions and has four degrees of freedom (This means it allows motion in four different directions). An example of a quaternary link is the (gripper mechanism of a robotic arm).
NOTE: (What are Nodes?)
In kinematic link or element, Nodes refers to connection points where two or more members of a mechanism are connected. These connections can be either rigid or flexible.
Classifications based on type of structural behaviour:
- Rigid link: A rigid link is type of kinematic link which does not deform under load while transmitting motion. Rigid links are usually found in mechanisms like linkages, where they convey motion or forces without significant deformation. Most of the used in mechanisms and machines are rigid links. there is an example of a rigid links is a (connecting rod, crank etc).
- fluid link: A fluid link refers to a mechanism or component that uses fluid ( generally a gas or liquid) to transmit force, energy and motion through the compression of a fluid or pressure. a fluid link using a contained liquid to transfer motion between parts. This systems are widely used in various applications, For example, including (hydraulic presses, hydraulic jacks, hydraulic brakes, and industrial machining).
- Flexible Link: A flexible link refers to a mechanisms or component that can bend or deform under force (tensile force). it can change their shape and length in response when force is applied. They are usually used to transmit for rotary motion or reciprocating motion. Commonly used materials for flexible links are, rubber and flexible metal alloy like nitinol. For example: (belts, ropes, wires, chains are used for flexible links).