In the theory of machine, kinematic pair is a simply a connection between two links or elements of a machine when in contact with each other and having relative motion between them. If the relative motion between them is successfully or completely constrained (i.e. in a definite direction),then the pair is describe as the Kinematic pair. (Gears are meshing together, wheel rolling on a flat surface, the hinge on a door) etc. These are all examples of kinematic pair in action.
Classifications of kinematic pairs:
- According to nature of contact between the links
- According to types of relative motion between the links
- According to nature of mechanical constraints between the links.
1. According to nature of contact between the links, the kinematic pair are classified as:
- Lower pair: In lower pair, if the two links has surface contact or area contact while moving, and the relative motion is only turning or sliding. Also, the contact surface of the two links are similar, then the pair is termed as the lower pair. (Shaft rotating in a bearing and slider in slider crank mechanism) are the examples of lower pair.
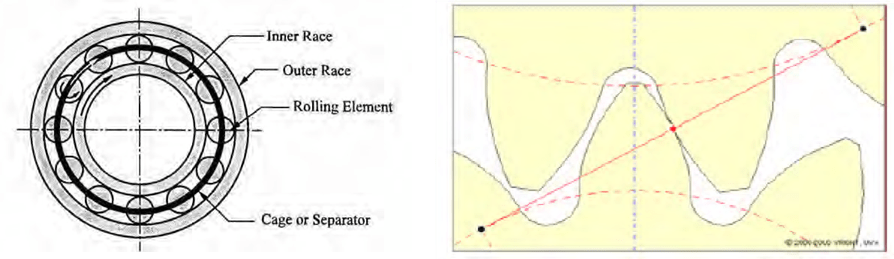
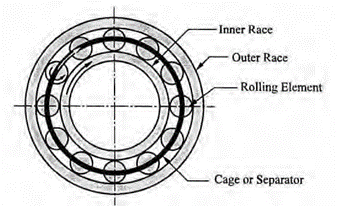
- Higher pair: In higher pair, if the two links (or a pair) has a point or line contact between them, and the relative motion takes place when the two elements is partly sliding and partly turning. Also, the contact surface of the two links are not similar, then the pair is termed as the higher pair. (A ball bearing or between two gear teeth in contact) are the examples of higher pair.
2. According to the type of relative motion between the two links, the kinematic pair are classified as:
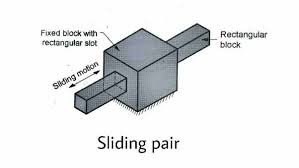
- Sliding pair: In slider pair, if the two links have a sliding motion with respect to each other and one is constrained to have a sliding motion relative to the other. The motion between the two links is in a definite direction, then the pair is termed as sliding pair. (A rectangular rod in a rectangular hole, crosshead and guide, etc.) are the examples of sliding pair. (Degrees of freedom-1)
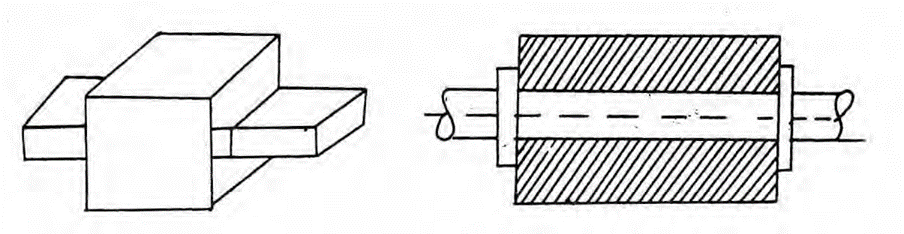
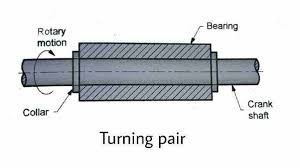
- Turning pair: In turning pair, two link are connected in such a way that one link is constrained to turn and revolve about a fixed axis of another link, then the pair is termed as turning pair. (Shaft rotates in the bearing, rotation of a crank in a slider crank mechanism, a cycle wheel revolving around its axle, etc.) are the examples of turning pair. (Degrees of freedom-1)
- Rolling pair: In rolling pair, two links are connected in such a way that one link is constrained to roll in another link which is fixed, then the pair is termed as rolling pair. ( A rolling wheel on flat surface, ball and rolling bearings, etc.) are the examples of rolling pair. (Degrees of freedom-1)
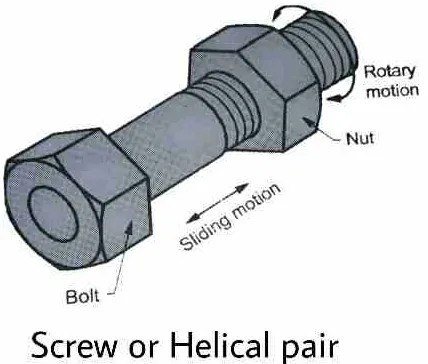
- Screw or helical pair: In screw pair, If the two links have a turning as well as sliding motion between them, then the pair is termed as screw pair. (Nut and bolt combination, lead screw and the nut of a lathe, etc.) are the examples of screw pair. (Degrees of freedom-1)
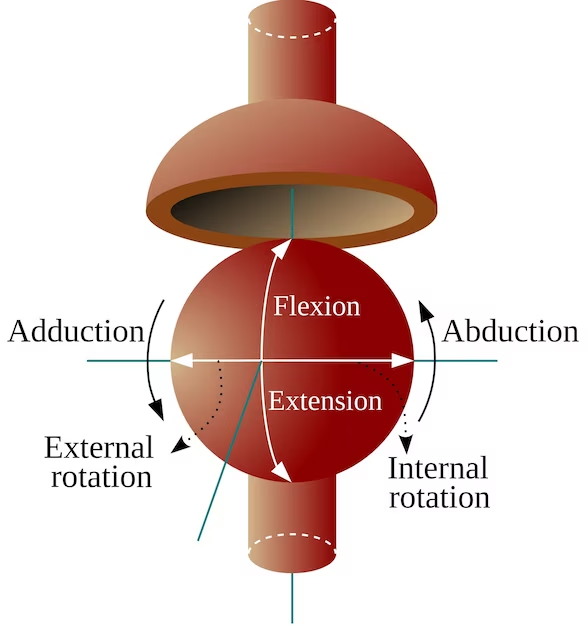
- Spherical pair: In spherical pair, If the two link of a pair are connected in such a way that one link (with spherical shape moves in 3 axis x, y, z) turns about the other fixed link, then the pair is termed as spherical pair. (Ball and socket joint, attachment of a car mirror, pen stand, etc.) are the examples of spherical pair. (Degrees of freedom-3)
3. According to nature of mechanical constraints between the links, the kinematic pair are classified as:
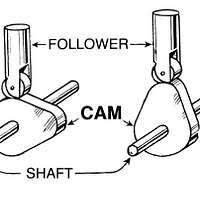
- Closed and open pair: In case of closed pair, the two elements of the pair are held together mechanically whereas in case of open pair, the elements of the pair are in contact due to force of gravity or due to some spring action the elements are not held together mechanically. For example, pair of cam and follower is an example of open pair as it is kept in contact by the force exerted by spring and gravity.